欧拉动力学方程
在本体坐标系中,刚体角动量随时间的变化可以写为两部分:
本体参考系可以理解为将参考系固定在刚体上。
dtdL=L˙+ω×L
根据牛顿运动定律,有:
M=dtdL
于是得到 欧拉动力学方程:
M=L˙+ω×L(1)
一般情况下:在本体坐标系中,转动惯量并不是一个随时间不变的物理量,这会导致方程 (1) 很复杂。我们选取刚体的三个主轴方向为坐标轴,建立参考系,称为 主轴参考系。在主轴参考系中,转动惯量为常量,如此,容易写得欧拉动力学方程的分量形式:
M1=I1ω˙1−ω2ω3(I2−I3)M2=I2ω˙2−ω3ω1(I3−I1)M3=I3ω˙3−ω1ω2(I1−I2)(2)
自由对称刚体
下面应用欧拉动力学方程研究自由对称刚体的运动。
对于自由对称刚体来说,有 M=0,I1=I2。欧拉动力学方程分量形式为:
0=I1ω˙1−ω2ω3(I1−I3)0=I2ω˙2−ω3ω1(I3−I1)0=I3ω˙3(3)
于是得到 ω3 为守恒量。
令 z=ω1+iω2,方程 (2) 成为:
I1z˙+ω3(I1−I3)iz=0
解为:
z=AeiΩt,Ω=I1I3−I1ω3
即:
ω1=AcosΩtω2=AsinΩt
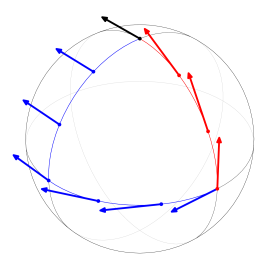
在本体坐标系中,角速度 ω 绕着 e^3 方向以角速度 Ω 画圆锥。对应的角动量 L 也在绕着 e^3 方向以角速度 Ω 画圆锥。
在空间坐标系中,角动量 L 守恒。设角动量方向为 z 轴,对应有 ω,e3 在绕着角动量 L 画圆锥(做 进动)。
可以得到:
L×e^3=i∑Iiωie^i×e^3=I1i∑ωie^i×e^3=I1ω×e^3=I1dtde^3
这表明 e^3 绕 L 作进动的角速度为:
ωp=I1L
如此总角速度可以表示为:
ω=ω1e^1+ω2e^2+ω3e^3=ωp+(1−I1I3)ω3e^3=ωp−Ω(4)
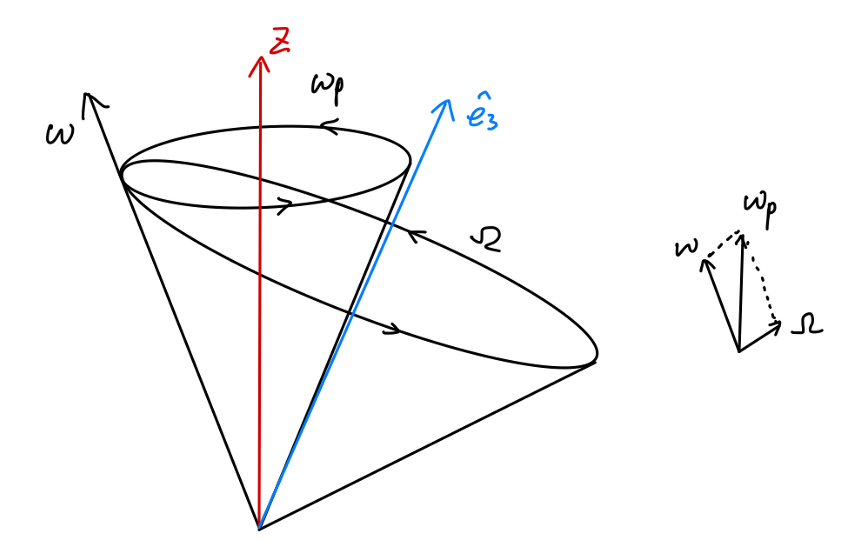
Fig1:空间极锥与本体极锥,Ω>0
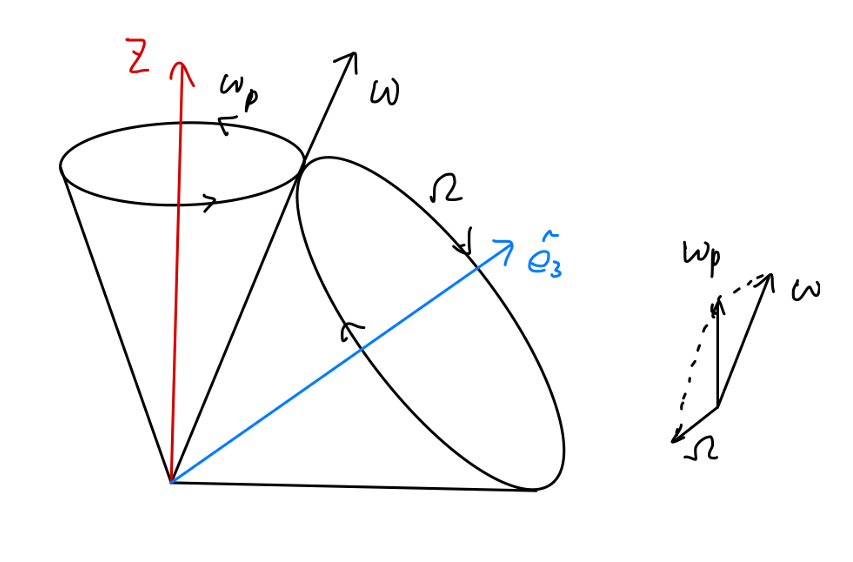
Fig2:空间极锥与本体极锥,Ω<0
欧拉角
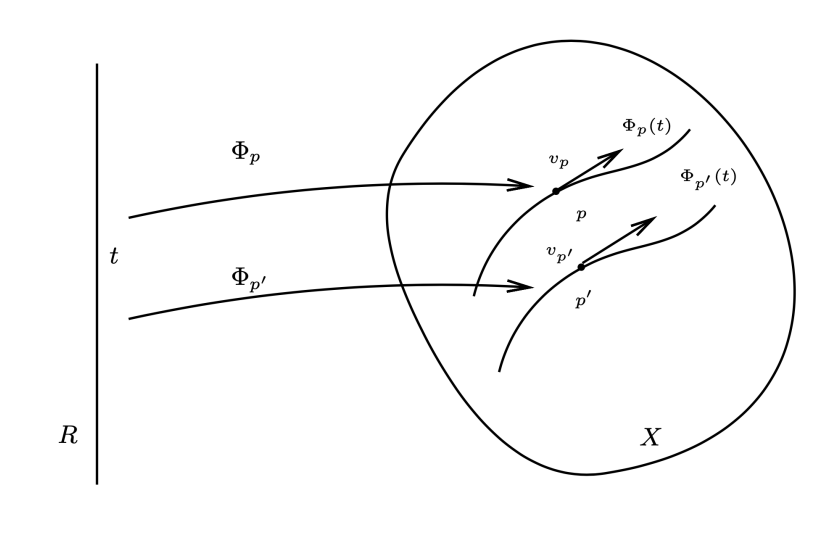
对欧拉方程的求解可以直接得到本体坐标系下对刚体的描述,但对空间坐标系中的行为却描述地并不那么直接。欧拉用 欧拉角 来描述刚体在三维欧几里得空间的取向。对于任何参考系,一个刚体的取向,是依照顺序,从初始的参考系,做三个欧拉角的旋转而设定的。所以,刚体的取向可以用三个基本旋转矩阵来决定。换句话说,任何关于刚体旋转的旋转矩阵是由三个基本旋转矩阵复合而成的[2]。

Fig3: 欧拉角[3]
欧拉角可以静态地这样定义(zxz顺规):
-
先绕 z 轴逆时针旋转 α(进动角)
-
再绕 x 轴逆时针旋转 β(章动角)
-
最后绕 z 轴逆时针旋转 γ(自转角)
利用矩阵给出欧拉角 (α,β,γ) 给出的基矢为:
⎝⎛e^1e^2e^3⎠⎞=⎝⎛cosγ−sinγ0sinγcosγ0001⎠⎞⎝⎛e^1′′e^2′′e^3′′⎠⎞=⎝⎛cosγ−sinγ0sinγcosγ0001⎠⎞⎝⎛1000cosβ−sinβ0sinβcosβ⎠⎞⎝⎛e^1′e^2′e^3′⎠⎞=⎝⎛cosγ−sinγ0sinγcosγ0001⎠⎞⎝⎛1000cosβ−sinβ0sinβcosβ⎠⎞⎝⎛cosα−sinα0sinαcosα0001⎠⎞⎝⎛ijk⎠⎞
(e^1,e^2,e^3) 为本体坐标系基矢,(i,j,k) 为空间坐标系基矢。
在刚体动力学中,我们通常将三个欧拉角分别记为 φ,θ,ψ,以下均采用这种记法。
三次旋转的转轴分别为 k,e^1′′,e^3′,分别记为:e^φ,e^θ,e^ψ。
那么角速度可以表示为:
ω=ω1e^1+ω2e^2+ω3e^3=φ˙e^φ+θ˙e^θ+ψ˙e^ψ(5)
根据几何关系,e^φ,e^θ,e^ψ 可以用本体坐标系基矢表示为:
e^φe^θe^ψ=sinθsinφe^1+sinθcosφe^2+cosθe^3=cosφe^1−sinφe^2=e^3(6)
将 (6) 代入 (5) 得到:
ω1ω2ω3=φ˙sinθsinφ+θ˙cosφ=φ˙sinθcosφ−θ˙sinφ=φ˙cosθ+ψ˙(7)
利用欧拉角得到定点转动的拉格朗日量为:
L=21I1(φ˙2sin2θ+θ˙2)+21(I2−I1)(φ˙sinθcosφ−θ˙sinφ)2+21I3(φ˙cosθ+ψ˙)2−V(φ,θ,ψ)(8)
欧拉角表述下的刚体动力学问题
自由对称刚体
此时 I1=I2,V(φ,θ,ψ)=0,根据式 (8),自由对称刚体的拉格朗日量为:
L=21I1(φ˙2sin2θ+θ˙2)+21I3(φ˙cosθ+ψ˙)2
此时,φ,ψ 成为可遗坐标。那么对应的广义动量为守恒量:
pψpφ=∂ψ˙∂L=I3(φ˙cosθ+ψ˙)=L3=∂φ˙∂L=I1φ˙sin2θ+I3cosθ(φ˙cosθ+ψ˙)=I1φ˙sin2θ+L3cosθ=L
θ 满足如下运动方程:
I1θ¨=I1φ˙2sinθcosθ−L3φ˙sinθ(9)
选取 L 沿着 k 方向,那么刚体无章动,θ˙=0。根据 (9),如此有:
φ˙=I1cosθL3(10)
进而得到进动角速度:
ψ˙=I3L3−φ˙cosθ=(I31−I11)L3=I1I1−I3ω3
这与之前使用本体坐标系中的欧拉动力学方程得到的结果是一致的。
拉格朗日陀螺
拉格朗日陀螺即重力场中对称刚体。其有:I1=I2,V=mghcosθ
其拉格朗日量为:
L=21I1(φ˙2sin2θ+θ˙2)+21I3(φ˙cosθ+ψ˙)2−mghcosθ
此时,φ,ψ 仍为可遗坐标。那么对应的广义动量为守恒量:
pψpφ=∂ψ˙∂L=I3(φ˙cosθ+ψ˙)=L3=∂φ˙∂L=I1φ˙sin2θ+I3cosθ(φ˙cosθ+ψ˙)=I1φ˙sin2θ+L3cosθ=L
θ 满足如下运动方程:
I1θ¨=I1φ˙2sinθcosθ−L3φ˙sinθ+mghsinθ(11)
可以得到,将方程 (11) 积分后实际等价于如下能量表达式(忽略 2I3L32 常数项):
E=21I1θ˙2+Veff2I1sin2θ(L−L3cosθ)2+mghcosθ(12)
这是一个一维运动方程,有效势的形式将决定 θ 的运动。我们讨论几种特殊情况:
- 均匀进动 θ˙=0
根据 (11) 得到:
I1φ˙2cosθ−L3φ˙+mgh=0(13)
存在均匀进动的条件是:
L32⩾4mghI1∣cosθ∣
- 快速均匀进动 L32≫4mghI1
方程 (13) 的解可以写为
φ˙=2I1cosθL3±L32−4mghI1cosθ≈2I1cosθL3(1±(1−L322mghI1cosθ))≈⎩⎪⎪⎨⎪⎪⎧I1cosθL3L3mgh
第一个解对应自由进动,L 始终为 z 方向:
⎩⎪⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎪⎧φ˙ψ˙L=I1cosθL3=(I31−I11)L3=cosθL3
第二个解对应重力引起的进动,L 始终为 e3 方向:
⎩⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎧φ˙ψ˙L=L3mgh=I3L3=L3cosθ
- 睡眠陀螺 θ=0,此时有 L3=L
θ 为小角度时的有效势为:
Veff=2I1sin2θ(L−L3cosθ)2+mghcosθ=2I1L3sin2θ(1−cosθ)2+mghcosθ≈2I1L341θ2+mgh(1−21θ2)=21(4I1L3−mgh)θ2+mgh
因此同样只有在:L3>4I1mgh 时才存在稳定解。
参考资料
- 王达,南京大学,理论力学讲义
- 欧拉角. (2021, May 7). Retrieved from 维基百科, 自由的百科全书: https://zh.wikipedia.org/w/index.php?title=欧拉角&oldid=65516193
- 由Lionel Brits - Hand drawn in Inkscape by me,CC BY 3.0,https://commons.wikimedia.org/w/index.php?curid=3362239