达朗贝尔原理
前两篇,我们讨论的系统为自由质点以及自由质点所组成的质点组。我们考虑了所有的外力和相互作用力,得到了动力学方程。但有时候我们只关注这些力作用的结果,而不在意这些力具体的数值。

例如:两质点 由 一个 刚性轻杆 连接。刚性指杆不发生形变,长度固定;轻杆则不用考虑其质量。为了求解质点组的运动,有两种方法:
- 考虑杆的弹力,列出牛顿动力学方程。
- 认为两质点的位置存在一定的约束关系,这里指质点间距离固定。不考虑弹力,在约束关系下求解。
其中第二种方法就与本篇所讲述的达朗贝尔原理相契合。我们以下首先介绍约束的一般理论。
约束
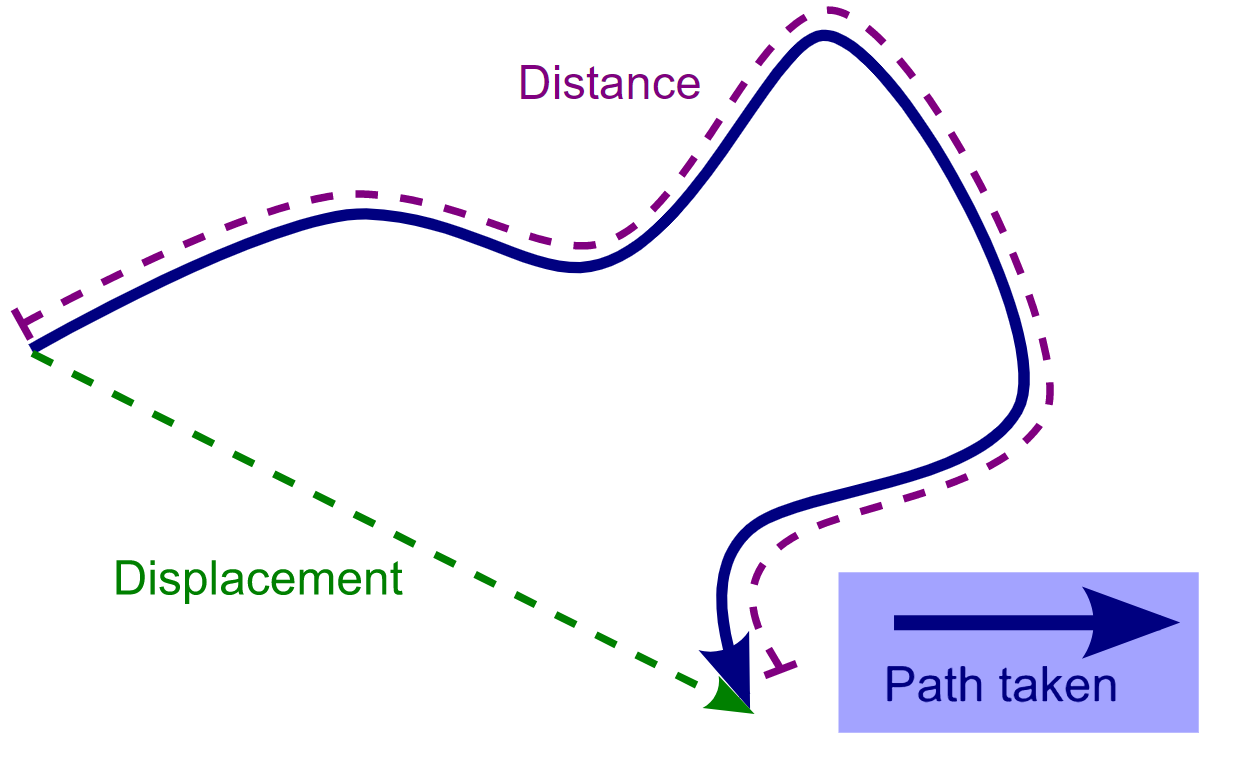
一个质点或质点系在空间中运动时,系统的状态可以由系统内质点的位矢 和速度 确定。很多时候,并不是所有可能的位矢、速度都是被允许的。我们称这种对位矢、速度的限制为 约束。如果一个系统不受约束,我们称其为 自由的。当存在一个或多个约束时,我们称这个系统是 非自由的。
举例:
- 一个在 平面内运动的质点,约束为 。
- 一个在球内的质点,约束为
一般情况下约束可以用关系式 给出。
现在对约束做一些分类:
- 按照 的类型:
- 若 为等式关系,称其为 双面约束,可记做:
- 若 为不等式关系,称其为 单面约束:
- 是否含时
- 不含时,为 定常约束
- 含时,为 非定常约束
- 是否含速度
- 不含速度,为 几何约束
- 含速度,为 微分(运动)约束
如果这些约束方程都是可积的(即没有不可积的微分约束),那么称这个系统是 完整的。若存在不可积的微分约束,那么称这个系统是 非完整的。
举例:
- 二维空间中的纯滚动
纯滚动条件是一个完整的微分约束:

由此可以积分得到一个几何约束:
在这个约束下,每一个位置都有一个确定的角度。
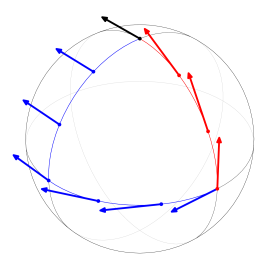
- 三维空间中的纯滚动
纯滚动条件是一个不完整的微分约束。
很容易发现,一个球可以通过任意的路径回到原点,因此同样的位置对应的角量不一定相同。这个微分约束不可积,该系统是不完整的。

几何约束与微分约束在无限小运动的意义下是一致的,对于一个几何约束:
的无限小运动情况:
得到:
这成为一个速度约束。反之,线性的速度约束也可化为一个无限小运动的几何约束。
在考虑约束之后,运动就不再自由了,而是满足这些约束方程。不受力时自由运动的质点在约束下不自由了,那么必然受到 约束力 的作用。质点有破坏约束使约束实体发生形变的趋势,因为力的方向与这种趋势相反,我们也常常称其为 约束反力。现考虑一个定常几何约束:

该约束使得质点 被限制在曲面 上运动。易得,沿着曲面切向的运动是不受约束的,此时约束力方向为曲面的法向方向。
可记作:
自由度
在力学里,自由度 指的是力学系统的 独立坐标 的个数。力学系统由一组坐标来描述。三维空间中自由运动的质点的自由度为3。对于 有限运动 来说,完整约束会降低自由度:
为自由度, 为质点数, 为完整约束个数。
在无限小运动情况下,某些非完整约束也能够降低系统的自由度。例如:线性速度约束能够化为一个无限小的几何约束,在小尺度上是‘完整’的。
举例
- 相对距离固定的两质点。
- 刚体。刚体内不共线的三个质点就能够完全确定刚体位形:
- 纯滚球
方向的约束为几何约束,纯滚约束是一个线性速度约束。在有限运动意义下:
在无限小运动意义下:
广义坐标
在分析力学中,广义坐标 是只能够描述(唯一确定)系统位形的一组参数。之前我们介绍过坐标,在一个给定的参考系中,我们可以赋予其坐标结构,那么我们就能够用坐标参量去确定点的位置。
- 对于空间直角坐标系, 三个长度参量,指示了在三个方向上的位置。
- 对于球坐标系,我们引入了 两个角量,来表示角位置。
广义坐标的第一层意思是对坐标的概念进行拓展。我们不必拘泥于坐标系,只要最终选择的一组广义坐标能够完整的描述系统就可以了。对于一个自由度为 的系统,则存在 个独立的广义坐标 。

例如对于双摆系统,自由度为 ,可取广义坐标为:。这样选取的坐标自动满足了约束。
如果选取的广义坐标数大于自由度的数量,必须要对其中的约束进行考虑,对动力学方程进行修正。虽然这样做引入了较多的广义坐标,但有时候方程形式会比较简单(特别是约束关系难以用显式表示时);若要求解约束力,解除对应的约束,引入相关的广义坐标是很必要的。例如,在求解杆 的作用力时,需要选取广义坐标为 。我们会在之后进行介绍。
虚功原理
在介绍达朗贝尔原理之前,首先要了解静力学中的 虚功原理
在静力学中,施加于某物体的作用力,对于给定的 虚位移 ,所做的机械功,称为 虚功。
什么是虚位移呢?一方面,虚位移就是不真实的位移,是我们假象出来的,是不会真实发生的。我们记做 。另一方面,虚位移是在满足约束的条件下任意选取的可能位移,是一个 自变量。

对于一个静力学系统,也就是说所有的坐标都不随时间变化。观察在给出虚位移 后,各个力的做功情况和体系的能量变化:
设体系的能量为 ,这表示体系的总能量完全由体系中各个粒子的坐标决定,考虑能量变化:
- 一阶
- 二阶
体系位于平衡要求,能量变化的一阶量为零;二阶量决定了系统的稳定性。若矩阵 是正定的,意味这该平衡是稳定平衡。
由于静力学系统中所有约束都是定常的,那么容易得到约束力的做功:
这是因为约束力为法向方向,而虚位移在切平面上。
我们将所有具有性质:
的约束,称作 理想约束。理想约束是分析力学的基本假定之一。
系统的能量变化也可根据力的做功写出:
由系统处于平衡状态得到 虚功原理:
一个常见的应用是:若存在保守力,那么对应的虚功可以用势能变化来表示。虚功定理写为:
表示非保守力所做虚功等于势能的“虚”增量。
达朗贝尔原理
达朗贝尔将静力学中虚功原理推广到动力学系统。单粒子的牛顿运动方程写做:
改一下形式:
这启发我们,只要引入惯性力,就可以将动力学问题转化为静力学问题。对应的“虚功原理”为如下性质:
由理想约束假定得到 达朗贝尔原理:
上述式子消除了约束力,但还不够好。因为虚位移的选取并不是任意的,而是满足额外的约束条件。所以上述式子并没有摆脱约束。为此,我们需要使用广义坐标改写达朗贝尔原理,最终会得到拉格朗日方程。这将在下一篇讲解。
参考资料
-
马尔契夫,理论力学,高等教育出版社,P14,P16
-
Wikipedia contributors. (2021, January 17). Generalized coordinates. In Wikipedia, The Free Encyclopedia. Retrieved 12:40, March 3, 2021, from https://en.wikipedia.org/w/index.php?title=Generalized_coordinates&oldid=1000840035
-
维基百科编者. 虛功[G/OL]. 维基百科, 201820180615. https://zh.wikipedia.org/w/index.php?title=虛功&oldid=49991322.
-
维基百科编者. 達朗貝爾原理[G/OL]. 维基百科, 201720171103. https://zh.wikipedia.org/w/index.php?title=達朗貝爾原理&oldid=46823058.